TP 6 : Application aux mathématiques
Contents
TP 6 : Application aux mathématiques#
Nombres complexes#
Dans cet exercice, un nombre complexe est représenté par un couple \((a, b)\) avec \(a\) la partie réelle et \(b\) la partie imaginaire.
On rappelle que si z est un couple, alors on peut obtenir le \(i\)ème élément de z avec z[i].
Question
Écrire une fonction conjugue(z) qui renvoie le complexe conjugué de z.
Solution
def conjugue(z):
return (z[0], -z[1])
conjugue((1, 2))
(1, -2)
Question
Écrire une fonction module(z) qui renvoie le module du nombre complexe z.
Solution
def module(z):
return (z[0]**2 + z[1]**2)**0.5
module((3,4))
5.0
Question
Écrire une fonction somme(z1, z2) qui renvoie la somme des nombres complexes z1 et z2.
Solution
def somme(z1, z2):
return (z1[0] + z2[0], z1[1] + z2[1])
somme((1, 2), (3, 4))
(4, 6)
Question
Écrire une fonction produit(z1, z2) qui renvoie le produit des nombres complexes z1 et z2.
Solution
def produit(z1, z2):
return (z1[0]*z2[0] - z1[1]*z2[1], z1[0]*z2[1] + z1[1]*z2[0])
produit((3,4), (5,6))
(-9, 38)
Question
Écrire une fonction puissance(z, n) qui renvoie le nombre complexe z à la puissance n.
Solution
def puissance(z, n):
if n == 0:
return (1, 0)
else:
return produit(z, puissance(z, n-1))
puissance((3,4), 3)
(-117, 44)
Question
Écrire une fonction fraction(z1, z2) qui renvoie le quotient des nombres complexes z1 et z2. Il faut donc mettre ce nombre sous la forme d’un nombre complexe \(a + ib\).
On pourra calculer à la main \(\frac{a_1 + ib_1}{a_2 + ib_2}\) en multipliant par la quantité conjuguée.
Solution
def fraction(z1, z2):
a, b = produit(z1, (z2[0], -z2[1]))
m = module(z2)**2
return (a/m, b/m)
fraction((3,4), (5,6))
(0.639344262295082, 0.03278688524590164)
Vecteurs#
Un vecteur est représenté par une liste de nombres. Par exemple, le vecteur \(\begin{pmatrix} 1 \\ 2 \\ 3 \end{pmatrix}\) est représenté par la liste [1, 2, 3].
Question
Écrire une fonction norme(v) qui renvoie la norme du vecteur v. On rappelle que la norme (euclidienne) d’un vecteur \(v = \begin{pmatrix} v_1 \\ v_2 \\ \vdots \\ v_n \end{pmatrix}\) est donnée par \(\sqrt{v_1^2 + v_2^2 + \cdots + v_n^2}\).
Solution
def norme(v):
n = 0
for x in v:
n += x**2
return n**0.5
norme([1, 2, 3])
3.7416573867739413
Question
Écrire une fonction produit_scalaire(v1, v2) qui renvoie le produit scalaire des vecteurs v1 et v2.
Solution
def produit_scalaire(v1, v2):
s = 0
for i in range(len(v1)):
s += v1[i]*v2[i]
return s
produit_scalaire([1, 2, 3], [4, 5, 6])
32
Question
Écrire une fonction orthogonaux(v1, v2) qui renvoie True si les vecteurs v1 et v2 sont orthogonaux et False sinon.
Remarque :
On peut utiliser la fonction
produit_scalairepour écrire cette fonction.Si
xest unfloat, il ne faut pas tester six == 0mais plutôtabs(x) < 1e-10, car les calculs sur les nombres flottants sont approchés (erreurs d’arrondis).
Solution
def orthogonaux(v1, v2):
return produit_scalaire(v1, v2) < 1e-10
orthogonaux([1, 0], [0, 1])
True
Polynômes#
Dans cet exercice, tous les polynômes sont représentés par une liste de coefficients : un polynôme \(P = a_0 + a_1 X + ... + a_n X^n\) est représenté par la liste \([a_0, a_1, \ldots, a_n]\) où \(a_i\) est le coefficient de \(X^i\).
Par exemple, \(-2 + 7X^2 + X^3\) est représenté par la liste [-2, 0, 7, 1].
Question
Écrire une fonction degre(P) qui renvoie le degré d’un polynôme P (représenté par une liste).
Solution
def degre(P):
return len(P)-1
degre([-2, 0, 7, 1])
3
Question
Écrire une fonction evaluer(P, x) qui renvoie la valeur \(P(x)\) du polynôme P en x.
Solution
def evaluer(P, x):
px = 0
for i in range(len(P)):
px += P[i] * x**i
return px
evaluer([-2, 0, 7, 1], 2) # P(2)
34
Question
Écrire une fonction derivee(P) qui renvoie la dérivée du polynôme P.
Solution
def derivee(P):
dP = []
for i in range(1, len(P)):
dP.append(P[i] * i)
return dP
derivee([-2, 0, 7, 1]) # P'(x) = 14X + 3X^2
[0, 14, 3]
Question
Écrire une fonction somme(P, Q) qui renvoie la somme de deux polynômes P et Q.
Solution
def somme(P, Q):
PQ = []
for i in range(max(len(P), len(Q))):
if i < len(P):
if i < len(Q):
PQ.append(P[i] + Q[i])
else:
PQ.append(P[i])
else:
PQ.append(Q[i])
return PQ
somme([-2, 0, 7, 1], [1, 2, 3])
[-1, 2, 10, 1]
Question
Écrire une fonction produit(P, Q) qui renvoie le produit R de deux polynômes P et Q. On rappelle que, si \(P(X) = \sum a_k X^k\) et \(Q(X) = \sum b_k X^k\), alors \(R(X) = \sum c_k X^k\) où \(c_k = \sum_{i+j=k} a_i b_j\).
On pourra commencer par créer une liste R contenant \(\deg(P) + \deg(Q) + 1\) zéros et, pour chaque coefficient \(a_i\) de \(P\) et \(b_j\) de \(Q\), ajouter \(a_i b_j\) à \(R[i+j]\).
Solution
def produit(P, Q):
R = []
for i in range(len(P) + len(Q) - 1):
R.append(0)
for i in range(len(P)):
for j in range(len(Q)):
R[i+j] += P[i] * Q[j]
return R
produit([-2, 0, 7, 1], [1, 2, 3])
[-2, -4, 1, 15, 23, 3]
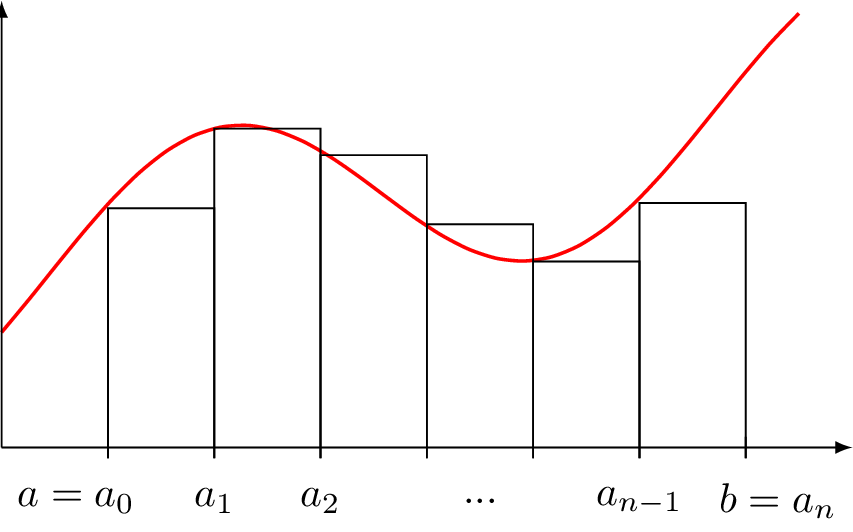
Intégrale#
La méthode des rectangles est une façon d’approximer une intégrale \(\int_a^b f(x) \, dx\) par la somme des aires de \(n\) rectangles de largeur \(h = \frac{b-a}{n}\) :
Question
Écrire une fonction methode_rectangle(f, a, b, n) qui renvoie l’approximation de l’intégrale \(\int_a^b f(x) \, dx\) en utilisant la formule ci-dessus. Tester avec une fonction carre (à définir) et vérifier à la main.
Solution
def methode_rectangle(f, a, b, n):
h = (b-a)/n
s = 0
for i in range(n):
s += f(a + i*h)
return s*h
def carre(x):
return x**2
methode_rectangle(carre, 0, 1, 100)
0.32835000000000003
Méthode du pivot de Gauss#
On veut résoudre un système linéaire de \(n\) équations à \(n\) inconnues de la forme :
On commence par réécrire ces équations sous forme matricielle :
Il est pratique de considérer la matrice augmentée du système :
Dans la suite, on pourra tester avec la matrice suivante :
import numpy as np
M = np.array([[-2.0,4.0,1.0,-18.0],[8.0,2.0,-1.0,6.0],[2.0,-1.0,2.0,27.0]])
M
array([[ -2., 4., 1., -18.],
[ 8., 2., -1., 6.],
[ 2., -1., 2., 27.]])
La méthode du pivot de Gauss utilise des opérations élémentaires sur matrice : dilatation, échange, transvection.
Question
Écrire une fonction dilatation telle que dilatation(M, i, a) multiplie la ligne i de la matrice M par a, c’est à dire l’opération \(L_i \leftarrow a L_i\).
Solution
def dilatation(M, i, l):
M[i] = l*M[i]
dilatation(M, 0, 2)
M
array([[ -4., 8., 2., -36.],
[ 8., 2., -1., 6.],
[ 2., -1., 2., 27.]])
Question
Écrire une fonction echange(M, i, j) qui échange les lignes i et j de la matrice M, c’est à dire l’opération \(L_i \leftrightarrow L_j\).
Solution
def echange(M, i, j):
M[i], M[j] = M[j].copy(), M[i].copy()
echange(M, 0, 1)
M
array([[ 8., 2., -1., 6.],
[ -4., 8., 2., -36.],
[ 2., -1., 2., 27.]])
Question
Écrire une fonction transvection telle que transvection(M, i, j, a) ajoute à la ligne i de la matrice M la ligne j multipliée par a, c’est à dire l’opération \(L_i \leftarrow L_i + a L_j\).
Solution
def transvection(M, i, j, l):
M[i] = M[i] + l * M[j]
transvection(M, 0, 1, 2)
M
array([[ 0., 18., 3., -66.],
[ -4., 8., 2., -36.],
[ 2., -1., 2., 27.]])
Exercice
Écrire une fonction pivot telle que pivot(M, j) renvoie un pivot sur la jème colonne, c’est à dire un indice \(i \geq j\) tel que l’élément \(m_{i, j}\) de M soit non nul.
Solution
def pivot(M, j):
for i in range(j, len(M)):
if M[i][j] != 0:
return i
pivot(M, 1)
1
Question
En déduire une fonction descente(M) réalisant la descente du pivot de Gauss sur une matrice augmentée M, de façon à obtenir une matrice échelonnée (avec des 0 en dessous de la diagonale).
Il faut donc, pour chaque colonne \(j\) de M (sauf la dernière, qui correspond au second membre de la matrice augmentée):
Soit \(k\) le numéro de ligne renvoyé par
pivot(M, j). Échanger la \(j\)ème ligne avec la \(k\)ème ligne de façon à ce que le coefficient \(m_{j, j}\) deMsoit non nul.Pour toute ligne \(i > j\), effectuer une transvection de façon à mettre un 0 sur la ligne \(i\), colonne \(j\) de
M.
Solution
def descente(M):
for j in range(len(M[0]) - 1):
echange(M, j, pivot(M, j))
for i in range(j+1, len(M)):
transvection(M, i, j, -M[i][j]/M[j][j])
descente(M)
M
array([[ -4. , 8. , 2. , -36. ],
[ 0. , 18. , 3. , -66. ],
[ 0. , 0. , 2.5, 20. ]])
Question
De façon similaire, écrire une fonction remontee(M) parcourant les colonnes de M de droite à gauche (sauf la dernière) en mettant des 0 au dessus de la diagonale. On supposera dans cette fonction que tous les coefficients diagonaux sont non nuls: il n’y a donc pas besoin d’appeller pivot.
Solution
def remontee(M):
for j in range(len(M[0]) - 2, -1, -1):
for i in range(0, j):
transvection(M, i, j, -M[i][j]/M[j][j])
remontee(M)
M
array([[ -4. , 0. , 0. , -12. ],
[ 0. , 18. , 0. , -90. ],
[ 0. , 0. , 2.5, 20. ]])
Question
Écrire une fonction gauss(M) prenant en argument une matrice augmentée M d’un système \(AX = B\) (c’est à dire M = (\(A \vert B\))) et appliquant la méthode du pivot de Gauss sur M. Pour cela, il faut :
Appliquer la fonction
descente(M)surM.Appliquer la fonction
remontee(M)surM.Mettre des \(1\) sur la diagonale de
Mavec des dilatations.La solution du système \(AX = B\) est alors donnée par la dernière colonne de
M.
Solution
def gauss(M):
descente(M)
remontee(M)
for i in range(len(M)):
dilatation(M, i, 1/M[i, i])
M1 = np.array([[-2.0,4.0,1.0,-18.0],[8.0,2.0,-1.0,6.0],[2.0,-1.0,2.0,27.0]])
gauss(M1)
M1 # la solution est sur la dernière colonne
array([[ 1., -0., -0., 3.],
[ 0., 1., 0., -5.],
[ 0., 0., 1., 8.]])